Discover how to streamline control development with an innovative approach combining Twin Simulate and PyBullet! 🚁✨
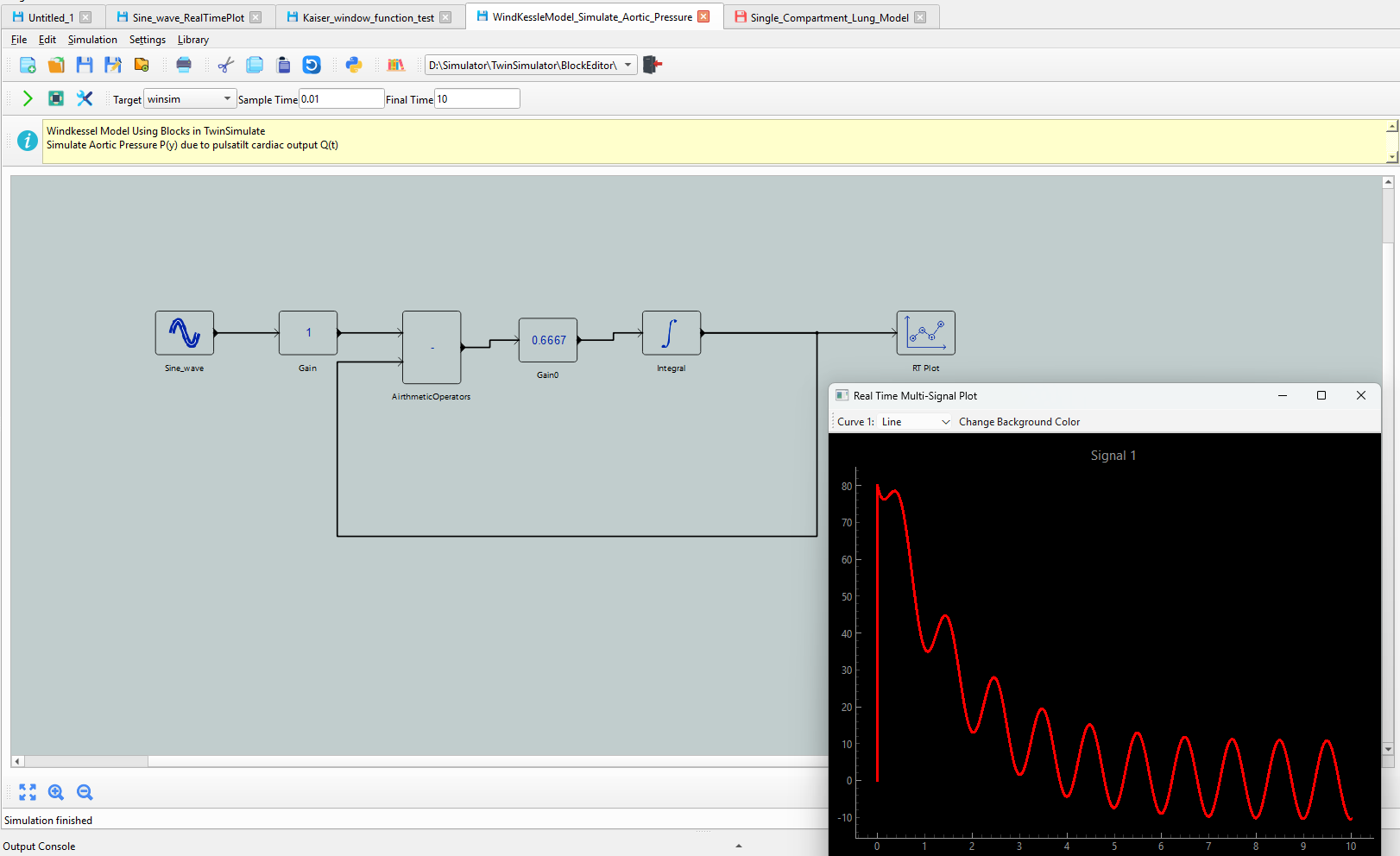
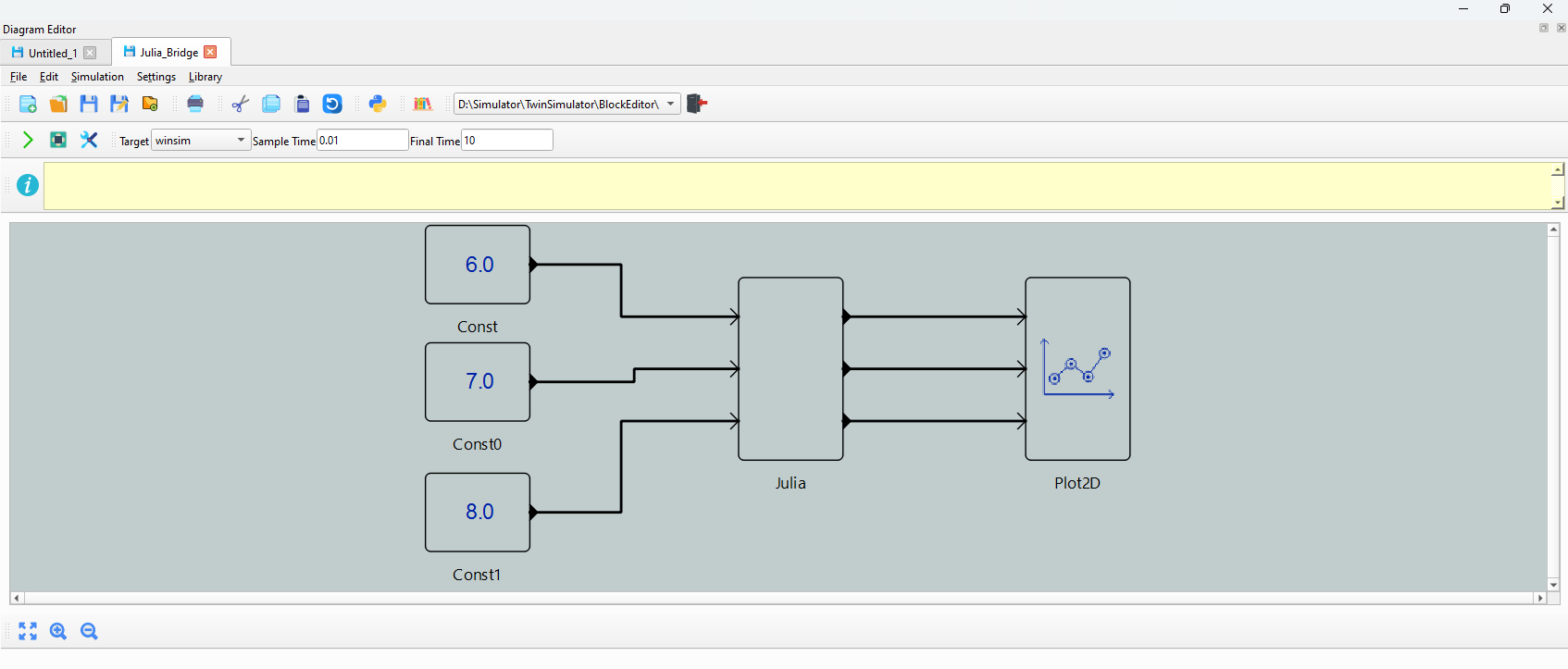
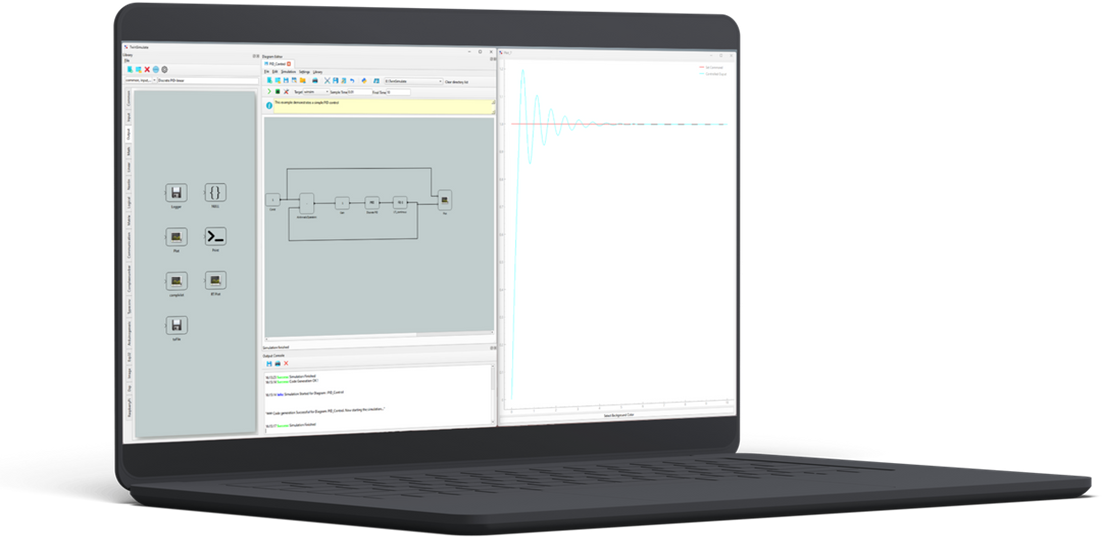
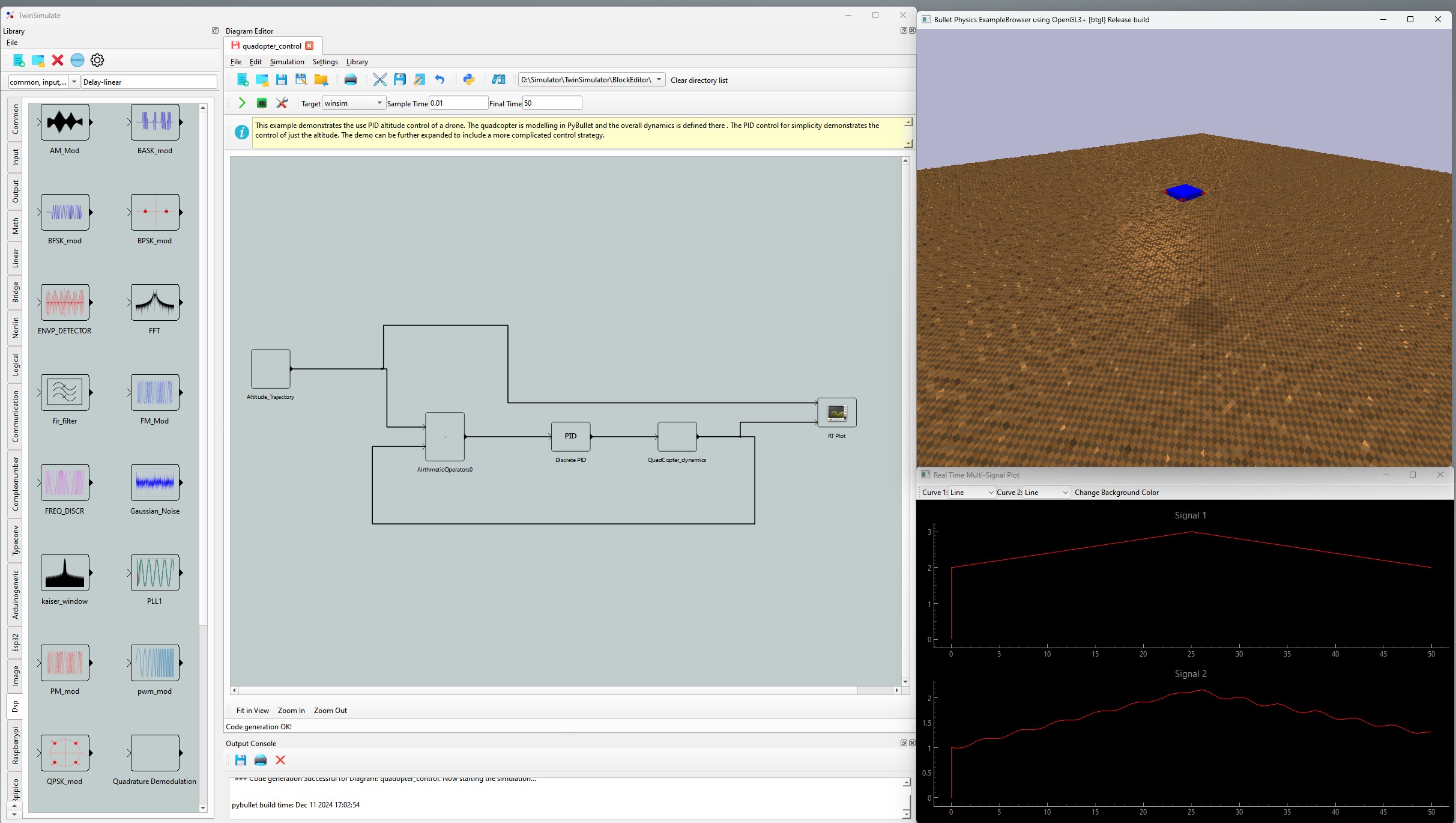
In this video, we demonstrate how to leverage Twin Simulate, a no-code model-based simulation tool, alongside PyBullet, a physics-based simulation environment. Using a drone modeled in PyBullet, we implement a PID controller for precise altitude control.
Key highlights:
✅ No-code experimentation: Twin Simulate enables intuitive model creation and simulation, reducing the need for extensive programming.
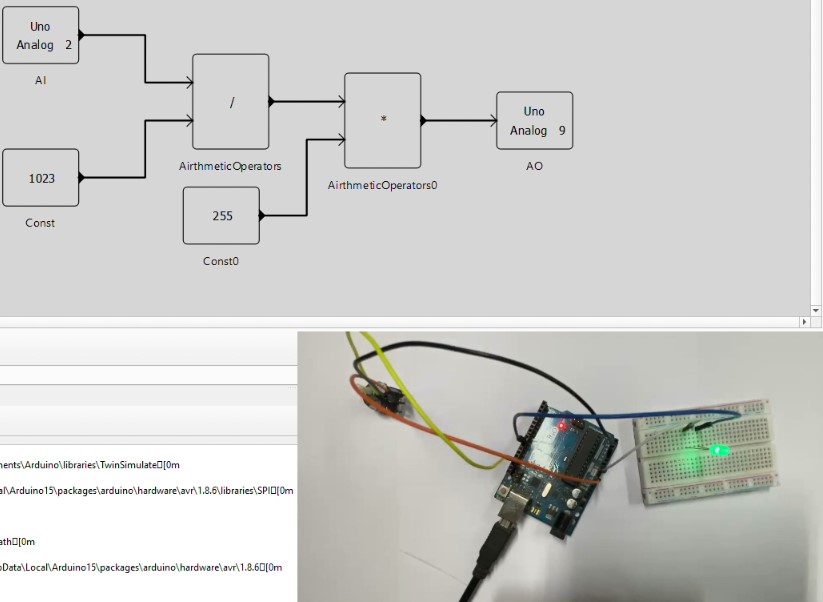
✅ Seamless integration: Interfacing with PyBullet allows for real-world-like testing, bringing a physical context to your control algorithms.
✅ Rapid iteration: Easily tweak parameters, refine controllers, and test new ideas without breaking workflow.
✅ Control development made easy: Transition from simulation to real-world-ready control solutions with minimal effort.
✅ Faster innovation: Combine high-fidelity modeling with intuitive tools to focus on creativity and problem-solving.
Whether you’re a beginner exploring PID control or an expert looking to streamline your development pipeline, this approach offers unparalleled flexibility and efficiency.
Don’t forget to like, share, and subscribe for more insights into advanced simulation techniques and control design! 🌟
Reach out to us to evaluate Twin Simulate and get started with your next project with us .